Configurable Mechanical Architecture
01Core structures can be adapted for reach, payload class, mounting, workspace, and service requirements without rebuilding from zero.
Deployable robotics platforms
Purpose-built robotic platforms engineered for real-world operation, integration, and long-term reliability.
MINTROBOT builds Pal Series, Son Series, and deployment-ready robotic systems for automation environments where maintainability, integration, and operation matter.
Positioning
MINTROBOT focuses on robotic systems that can survive real operational constraints: cost, maintainability, integration, reliability, and field use.
Core structures can be adapted for reach, payload class, mounting, workspace, and service requirements without rebuilding from zero.
Mechanical, electrical, and control decisions are evaluated against maintenance, cost, reliability, and site constraints.
MINTROBOT focuses on products that can be integrated, supported, and improved beyond the prototype phase.
Platforms
MINTROBOT's current platform structure is centered on two deployable product families: a service manipulation base and an SDR-native end-effector module.

Column Platform
Column-style platform for table-top and fixed-workspace manipulation.
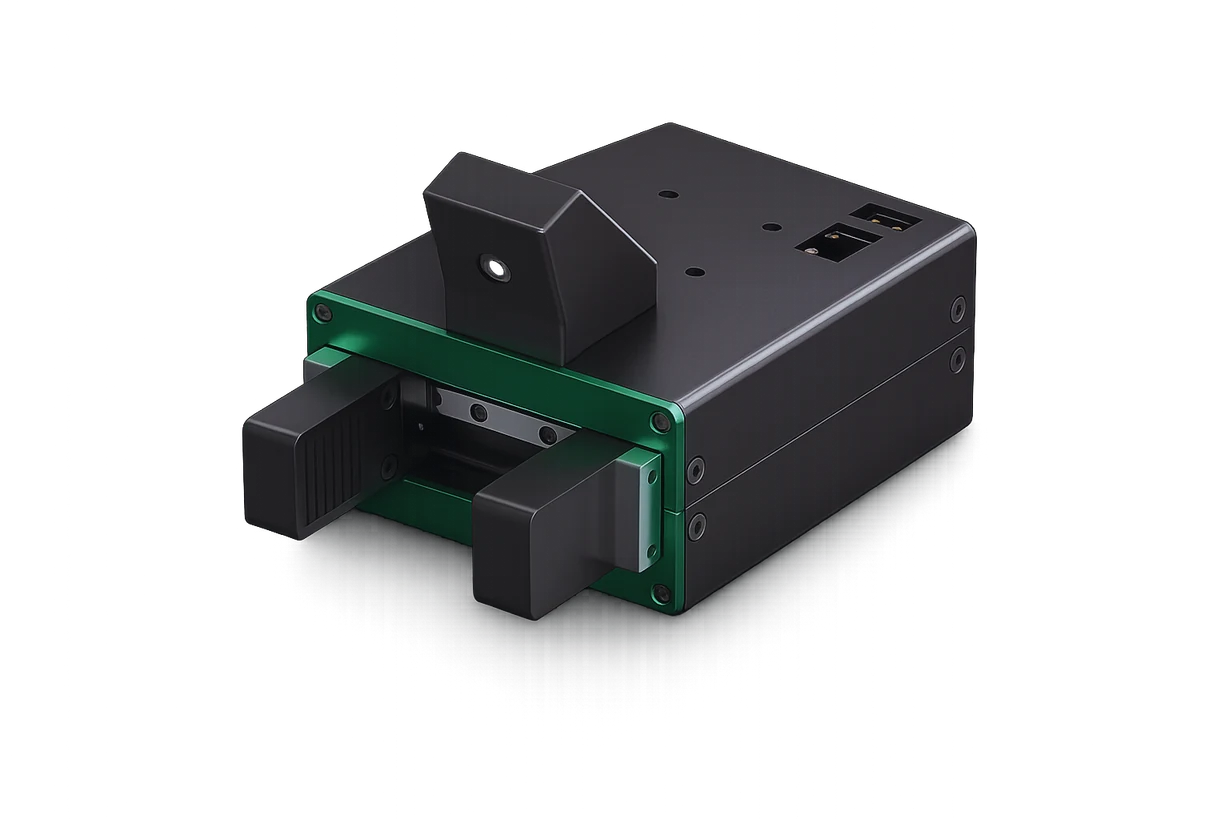
Smart End-Effector
SDR-native smart gripper with embedded control and middleware connectivity.
Solutions
Solutions define how Pal Series, Son Series, and related modules are configured for a target task through two practical layers.
Platform structure
Adapt Pal Series, Son Series, and related modules around workspace, payload class, mounting, tooling, service access, and manufacturability.
Control workflow
Prepare SDR interfaces, data paths, application logic, and simulation checks before field use.
Deployment reference
A real service automation deployment used a purpose-driven platform architecture to reduce unnecessary system complexity, validate logic in simulation, and move toward commercial operation without treating the robot as a generic industrial arm installation.

Simulation
Architecture and operating logic validated before build decisions.

Real deployment
Project-specific implementation focused on cost structure, maintainability, and commercial operation.
Field experience
Real automation work exposes constraints that demos rarely show: service access, uptime expectations, operator workflows, spare parts, commissioning risk, and site-specific integration. MINTROBOT keeps those constraints visible from the earliest design decisions.
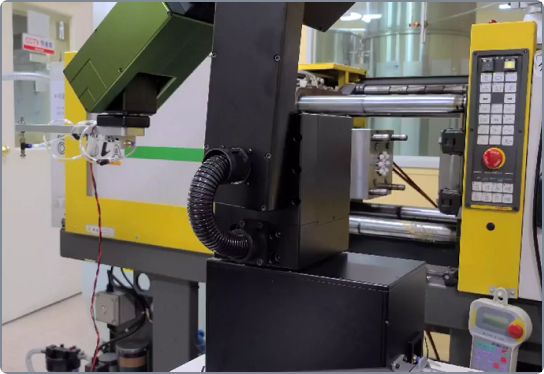 REF 01
REF 01 Robotic mechanisms developed around equipment constraints, process flow, and service access.
 REF 02
REF 02 Practical deployment work where cost structure and maintainability shape the platform decision.
 REF 03
REF 03 Operating logic and workspace assumptions checked before committing to build decisions.
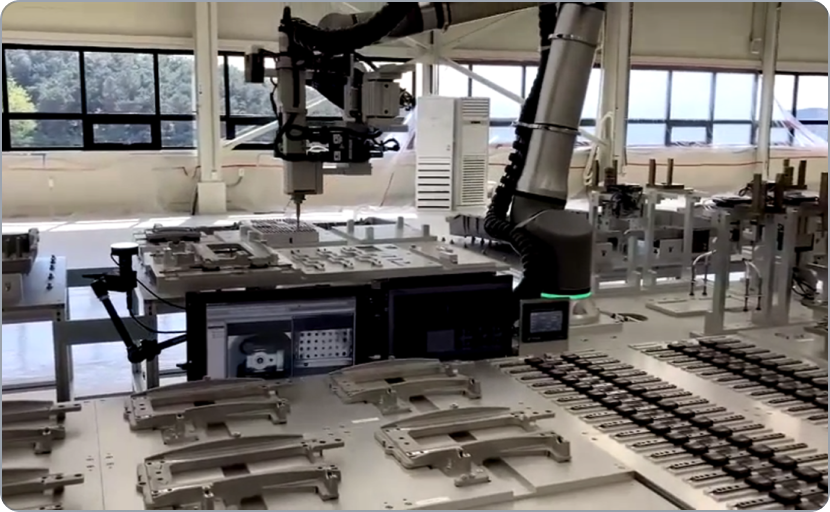 REF 04
REF 04 Validated robotic platforms integrated with peripheral devices, sensors, fixtures, and process equipment to automate high-complexity application workflows.
Project intake
Talk with MINTROBOT about requirements, operating conditions, integration constraints, and the path from prototype to field operation.
Talk to MINTROBOT